步行机器人2 蜘蛛🕷️

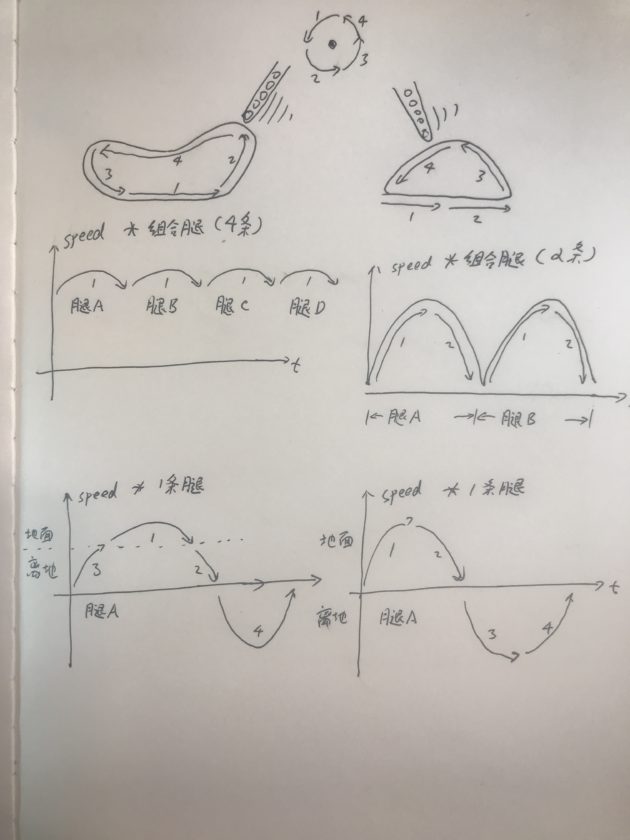
上篇讲的那个不完美的步行轨迹 也有也是唯一的优点:在地面的接触时间够长,长达半圈。这样2条腿就能保证稳定的支点 […]
上篇讲的那个不完美的步行轨迹 也有也是唯一的优点:在地面的接触时间够长,长达半圈。这样2条腿就能保证稳定的支点 […]
大家都在做机甲 好漂亮 可惜我不会呀。 :( 哭 我只会做丑陋的机器人。 研究了一下连杆的步行机构有很多原理哦 […]

感谢英雄会phy哥、侯哥、以及各位大佬的支持,在2020这个特殊的年份举办了户外的LEGO越野赛。 小弟不才 […]


架桥坦克,以前有个大神做过。我一直希望做一个女孩版的(猴版的高尚托词,哈哈哈哈哈) 左思右想,找到了一个超级简 […]

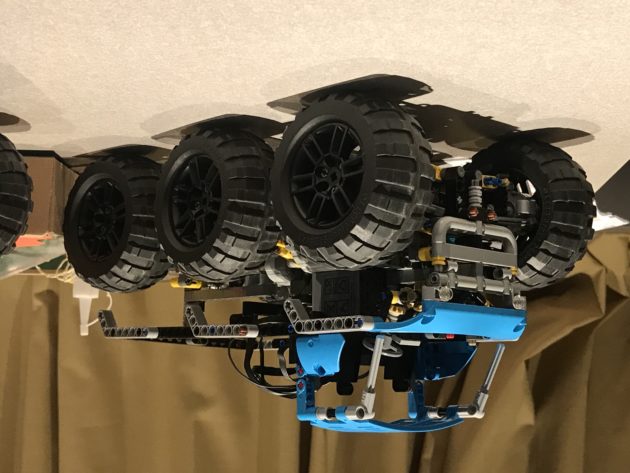
在家里躲肺炎,一口气做了6辆车,累死我了。 在2.0的基础上做了多项改进: 1-重做了大梁的结构,更加可靠。 […]

使用42099的轮边减速。 比1.0改进处: a 左右2边独立驱动,转向时相当于有差速。 b 刚性车架,转向时 […]

8轮卡车的尝试。 尝试1: 重点在悬挂的弹性上做了些尝试。10厘米的垂直障碍可以通过。 尝试2: 2XL前后无 […]
42099 42110 新零件 真香。 应用到6轮卡上,效果杠杠的。 轮边变速可以有从以前的1.67/3/增加 […]

本来准备参加2019英雄会南京比赛的。可惜没能成行。想做一点小突破。来个8轮的 :)还必须能在狭窄区域里转来转 […]