9527moc-乐高科技蜘蛛坦克

大家好,我是9527,这次为大家介绍下我的新作品-蜘蛛坦克,希望大家喜欢。

 先放个视频链接
先放个视频链接
从很早以前,我就想制作仿生类moc,也尝试着moc一些小型的4足6足运动等。感觉乐高科技对仿生类运动不大友好,动力小,传动费劲,占用空间大,载重不好,动作僵硬等等问题,所以在做这个moc时我就想好了不能做的太重(我是巨大控),后来想起小时候超能勇士的狼蛛有两种运动模式,我感觉这样很帅,所以就决定给他加上履带,可以实现两种行走模式。这样就有了蜘蛛坦克的雏形,之后再moc中有两个最大的难题,1是流畅好看的行走,2是抬起8只腿变形坦克的动作,接下来看我怎么解决的。
![M24NWR[C)S`KH$4M%X]0DHU](http://www.heroeslug.cn/wp-content/uploads/2019/03/M24NWRCSKH4MX0DHU.png)
这里不谈两足行走(不稳),先从6足行走说起,其实最开始我是想做6足行走的,但是后来发现加入坦克模式后,6足行走不稳才增加到8足。比较常见的6足行走是上图这种,三条腿是一组,利用轴旋转带动零件画“圆”产生出腿部的高低差,左右两腿频率一致,中间腿和另一侧左右腿频率一致,这样就形成了两组腿,然后交替运动实现行走。他整体呈现出一个稳定的三角形结构,走起来挺稳健的,但是缺点是动作僵硬,好似6根柱子直上直下的运动,傻傻的,一点不仿生。所以我从一开始就决定不用这种结构,我要做更真实好看的行走结构。
之后我看到了五十川芳人的虎之卷的6足运动
还有仓鼠大神2016年的月报总结片尾的moc
![I{CB3L}WYFTCMH3}B]{%@2U](http://www.heroeslug.cn/wp-content/uploads/2019/03/ICB3LWYFTCMH3B@2U.png)
通过研究这两份资料,最后就有了此moc的仿生行走结构

此结构是通过水平画“圆”让腿产生外八字的效果,在通过上面的固定连接件,限制腿部活动范围,从而让腿外八字的同时兼具上下运动,这样一个完美的仿生运动诞生了。这里特别说明一下,腿部底下不要加入橡胶垫,橡胶垫虽然提供很好的抓地力,让蜘蛛模式行走更稳,但是在变形坦克模式时给抬腿运动增加了阻力。
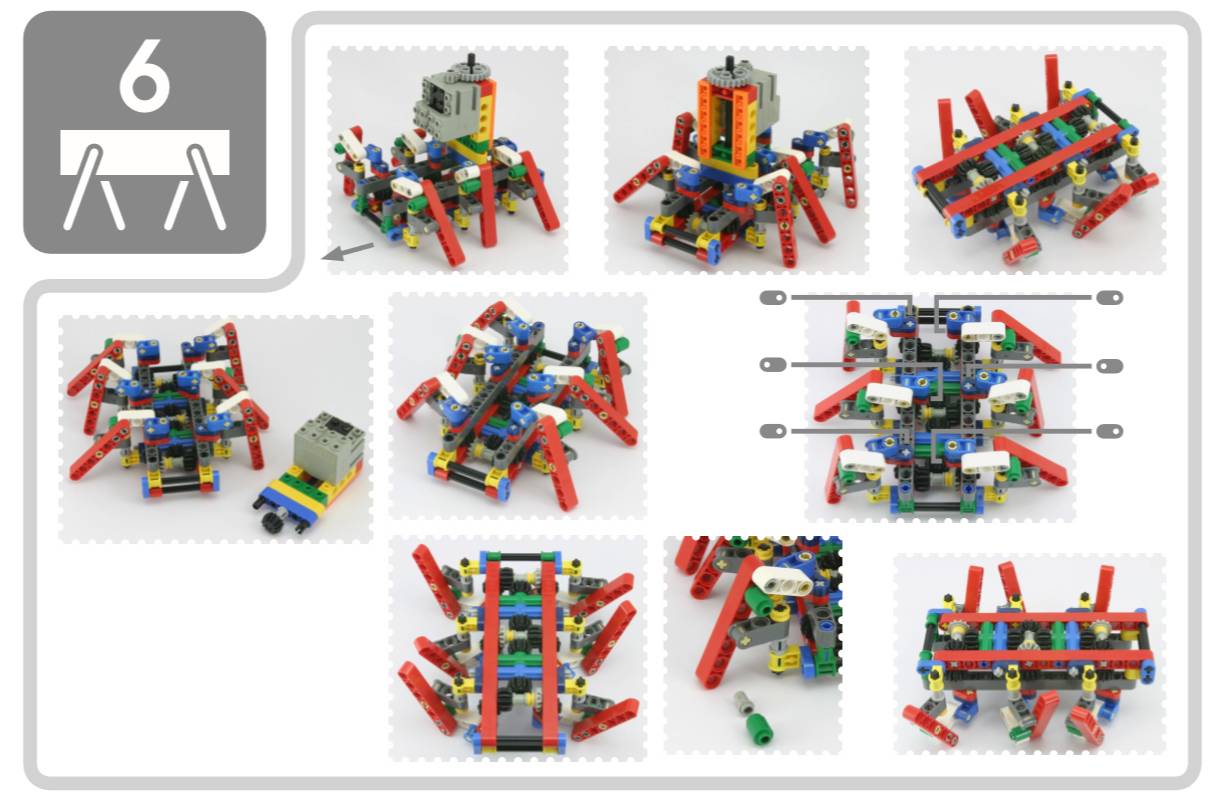
然后在说说第二个问题,如何抬起两条重重的大腿!扭力,增大扭力,在用最少的发动机前提下增大扭力,我试过用俩XL驱动,但效果并不好,因为xl本身很重,而m电机也不好固定,所以最后我选择了l号电机。
上图就是基本结构,我用蜗齿传动给20齿,然后在传递给小旋转平台,两边结构一致。
![$6I8N2[6IR0D%2L$4ML]DR3](http://www.heroeslug.cn/wp-content/uploads/2019/03/6I8N26IR0D2L4MLDR3.png)
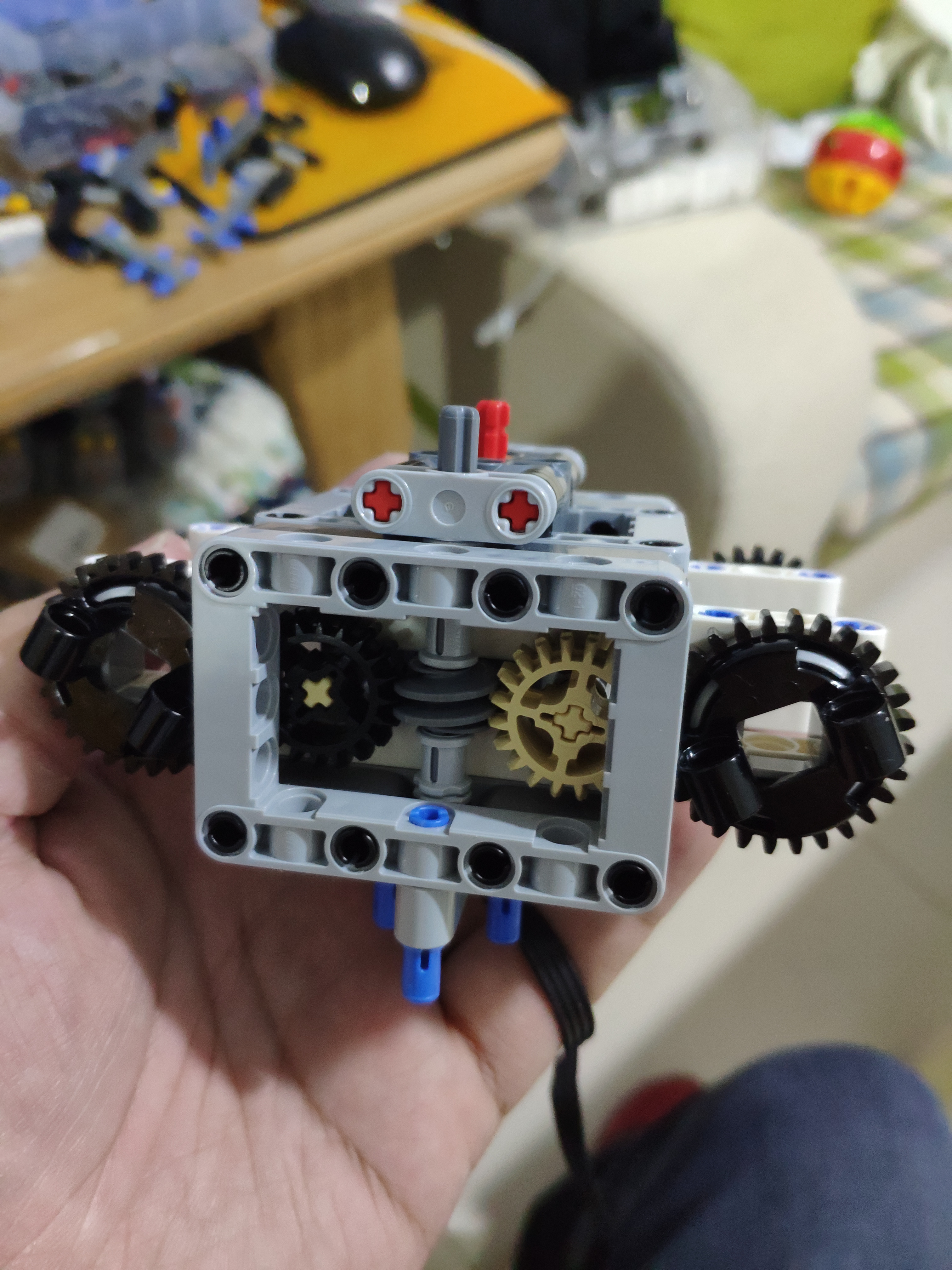
l电机在中间,主动齿轮是8齿,传递给两侧的40齿齿轮,不好意思我不爱算齿轮比,我是凭感觉,觉得扭力够了就行了哈哈。最后把这个结构固定牢固完成!这样一个电机传倒出足够的扭力,在用两侧共四个旋转平台抬起8只腿!注意不要用国产零件,扭力不够的。
完成以上两个难题,此moc就完成了一大半,可以流畅的实现蜘蛛行走,和“下蹲起”运动。剩下的工作就是锦上添花了,加个履带,加个机枪。
然后在谈谈蜘蛛网,蜘蛛网套件是乐高城市系列出现的(多玩几个系列有好处啊),当时我看到这个零件就想好了未来仿生moc用的上,因为他不涉及到自动上子弹问题,所以是个比较简单的发射结构,用皮筋就能实现。如下图,我们只需要做简单点,减少整个moc体重就好。
最后说说配色,我一开始就想好了用绿色,所以提前准备好了材料(很多没用上),主色绿色,黑色辅色,点缀色是黄色,我建议一个moc(科技类的)不要超过4种颜色,否则很乱。按照70%主,20%辅助,10%点缀的配色就好。
最后说下玩科技类moc的感受吧,我挺喜欢科技类moc的,设定一个目标,反复试验并最终完成,整个过程很享受。只要有时间,我会去设计更多有意思的科技类moc,希望大家喜欢,最后感谢乐构英雄会,感谢楚沐猴,再见,期待我的新作品吧。
