三变金刚:31062 Robo Explorer 探险机器人 评测

感谢乐高公司的支持与信任,提供了31062给乐乐镇做品鉴与评测。
31062 Robo Explorer,是今年Creator创意三合一系列套装之一,有205块砖,年初发售,官方定价19.99美元。作为创意系列的一员,31062秉承了这一系列的传统,除了能够搭建一个探险机器人,还能拼搭一只机器狗或一只机器鸟。
另外,这是来自香港的设计师冻啡的作品,难得见到华人设计师的套装,一定要支持一下!
外包方面,继续使用了传统的三合一外包样式,展示三种形态。尤其是外包背面,对三种形态的特色都有展示。另外,也会在外包上看到这款套装的另一卖点:发光砖。


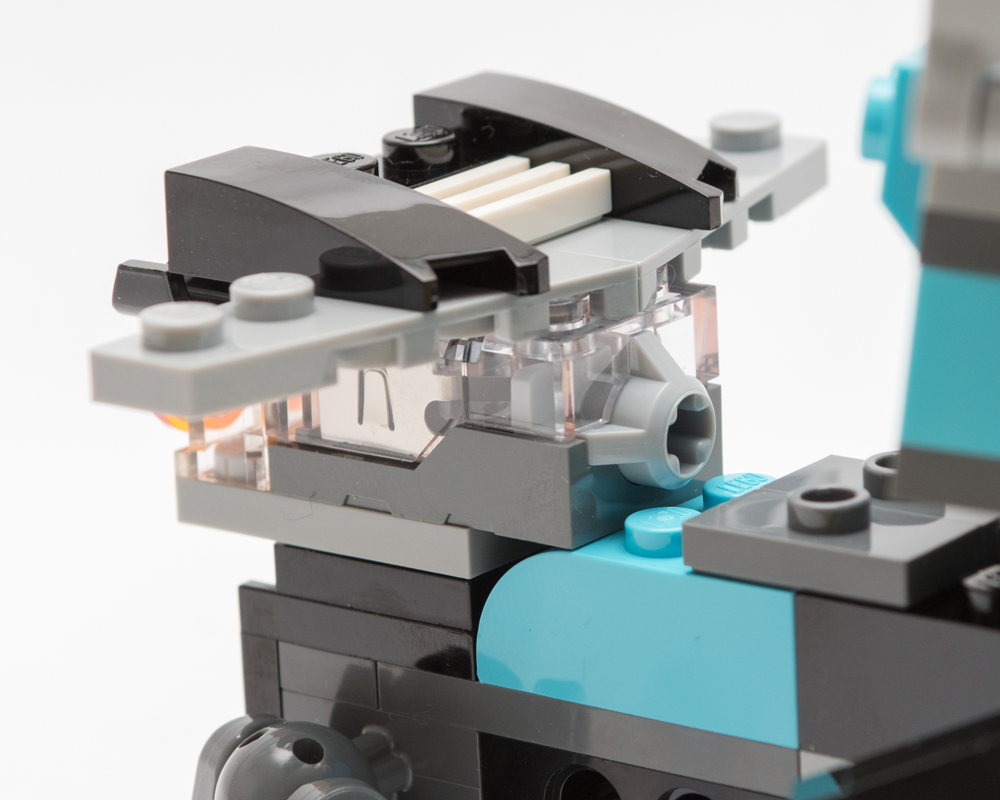
近几年每年创意三合一系列中都会有一盒以发光砖为核心部件的套装,去年是31051 Lighthouse Point 灯塔,今年就是这款31062探险机器人了。发光砖是一个2×3的砖块,内置纽扣电池,按压砖块侧面带十字孔的按钮就可以发光(自动忽略我的肥手)。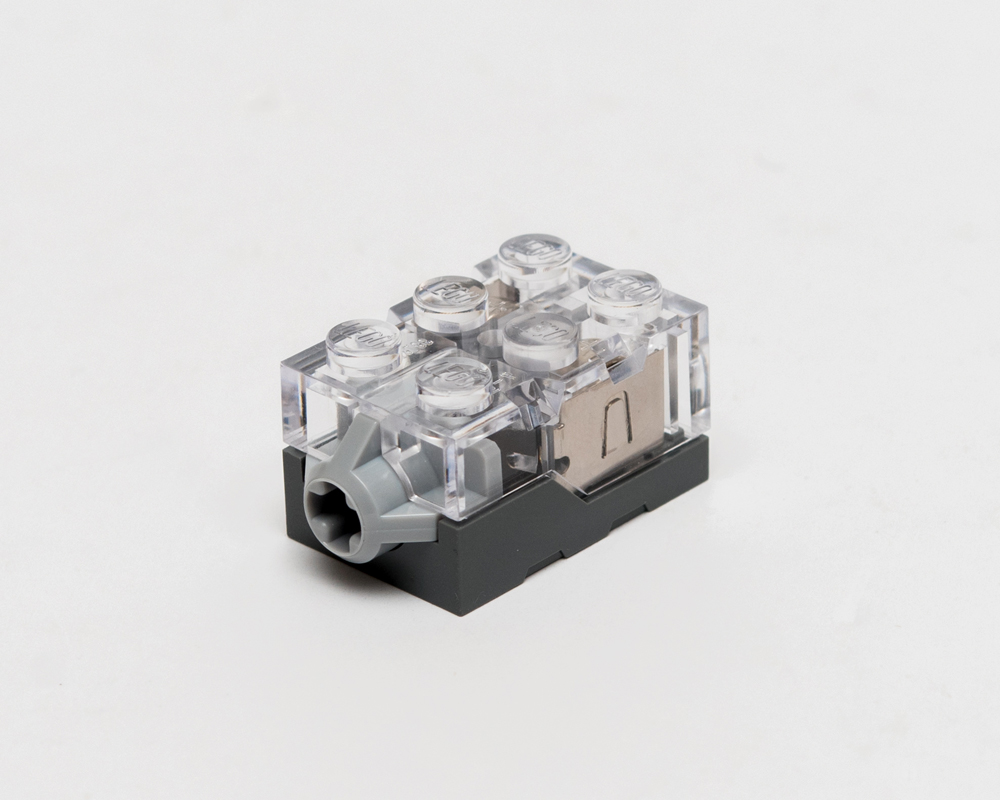


创意三合一系列套装的三个形态,并不是都能使用上全部的砖块,基本都是一个最简单的形态,使用的砖块最少;一个稍复杂些的形态,使用砖块多些;最后一个最标准的形态,会使用到全部的砖块。我们就由易到难,看看31062。
机器鸟
31062最简单的形态,是机器鸟。对比下面的图就可以看到,这一形态大概只是用了一半不到的零件,因为太过简单,以至于我第一眼看下来,要查询官方的介绍资料,才能确定这真是一只“机器鸟”。但是仔细看下来,这是一只和机械风格结合的很好的鸟,鸟类的特点都有充分的表现。





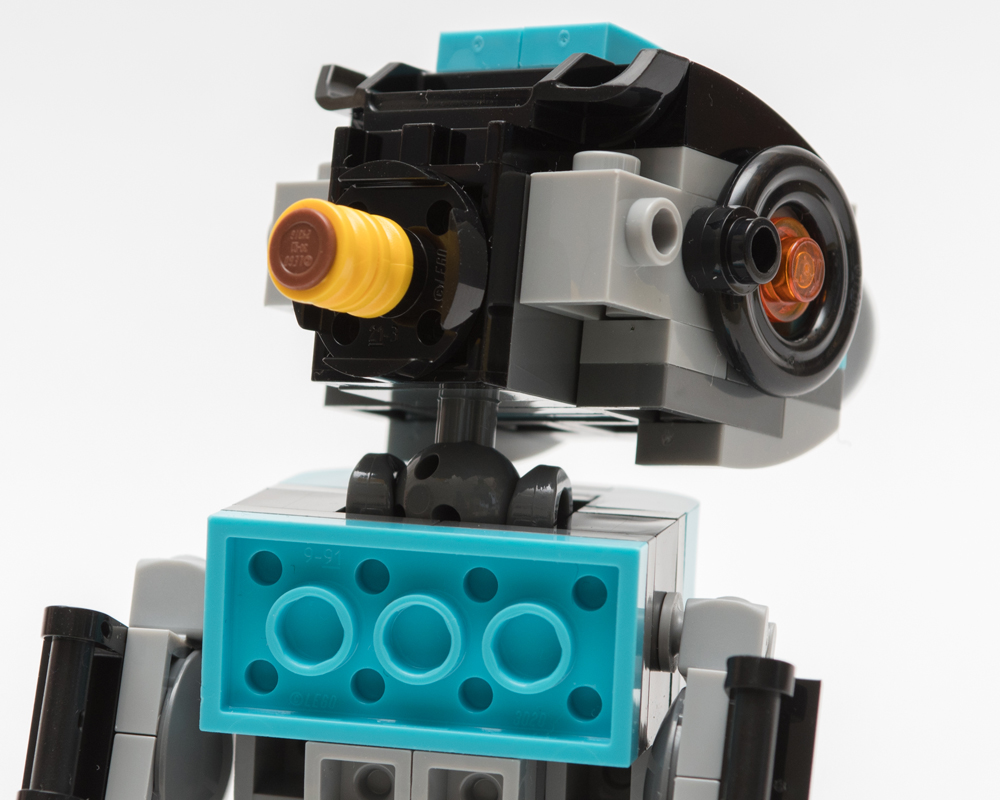
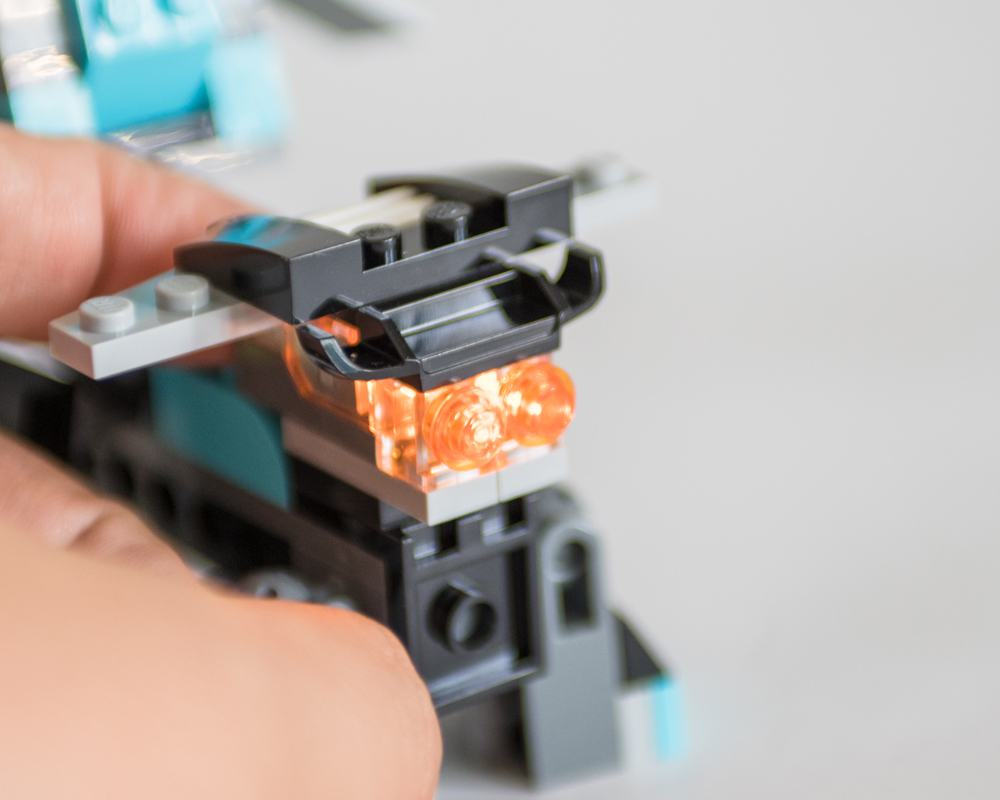
机器鸟的头部设计非常细致,单看头部会对这一造型比较满意,除了鸟嘴部分有些不到位,整体结构和细节都很有趣,既能让人联想到鸟类的特征,也能凸显机械感。而发光砖就充当了头部的主体,按压鸟嘴就可以让眼睛发光。




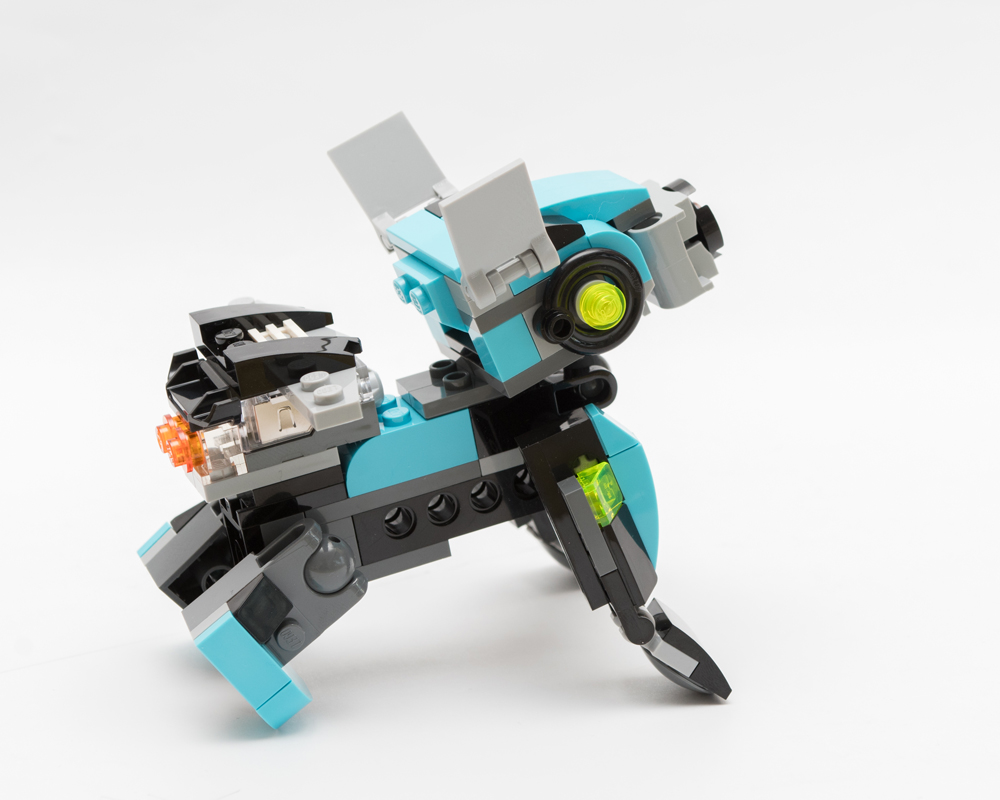
相对于头部比较严谨的设计,躯干与双翅双脚多多少少显得比较简陋了,整体的结构非常像企鹅,但是按照外包的图片,似乎是一只可以飞上天的鸟儿。那么,二头身加上短小的四肢,我能理解为这是只Q版的机器鸟吗?如果按照这个思路,这只小鸟好可爱!



那么,让我们张开双翅,昂首高飞吧。虽然没法真的飞起来,但是抬头张翅的样子,比刚搭好时低头收翼要精神许多,如果硬要匹配现实中的鸟类,我觉得可能是只鹦鹉或者企鹅?





机器狗
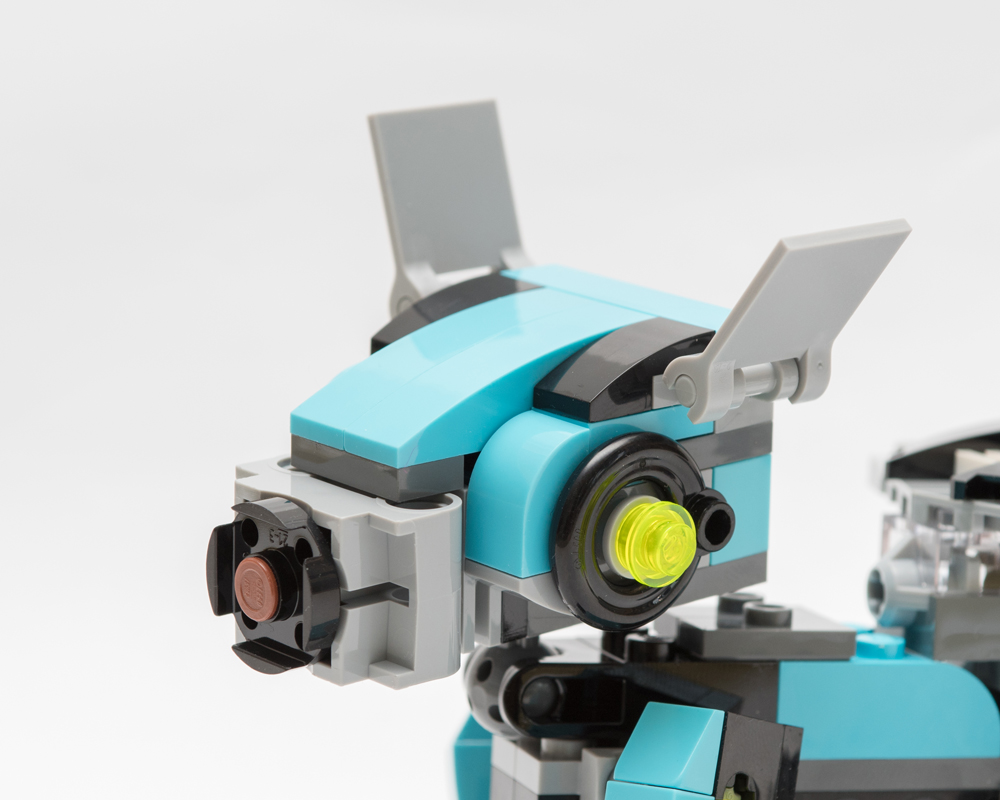
接着来看复杂点的形态,就是机器狗了。这只小狗增加了不少零件,外形憨态可掬,造型非常到位。除了展现机器和狗的特点,还增加了飞行背包,带来更多的未来感。





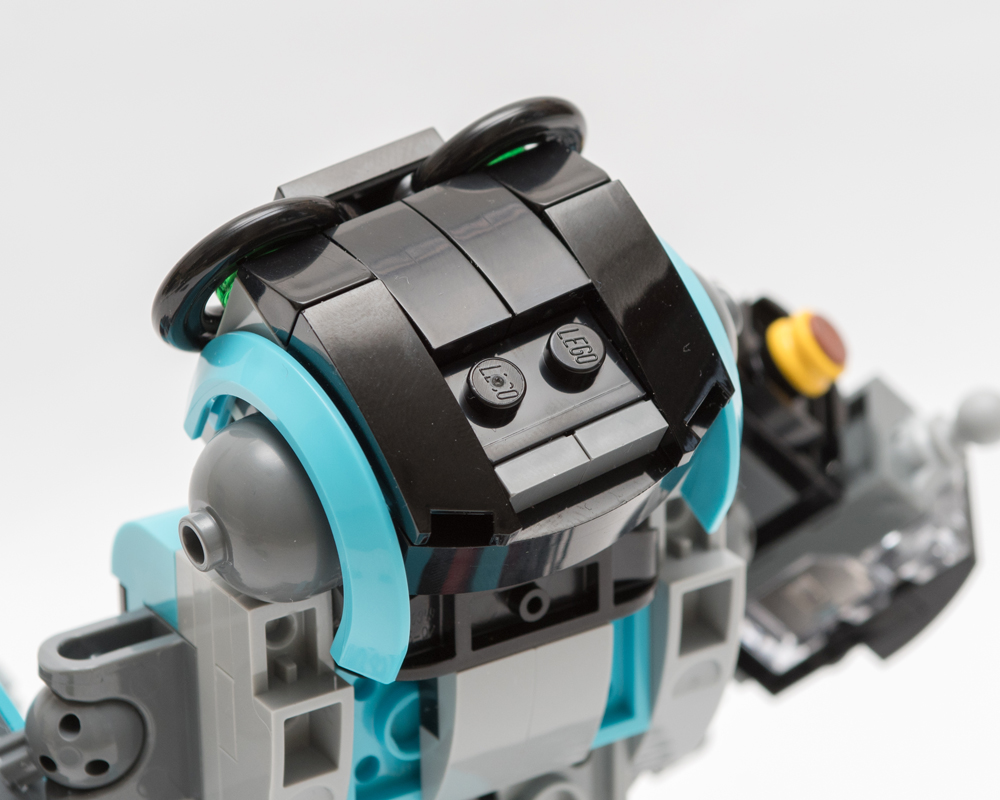
机器狗的头可以随意转动,耳朵也能上下转动,调整耳朵的角度后,就好像是完全不同的两只狗了!而狗嘴居然是用发动机缸体零件2850做的,真是神奇的零件应用!前后腿使用了各种铰链、球形零件做连接,虽然都是常见的处理方法,但是前后腿用了完全不同的设计,把套内零件利用到了极致。
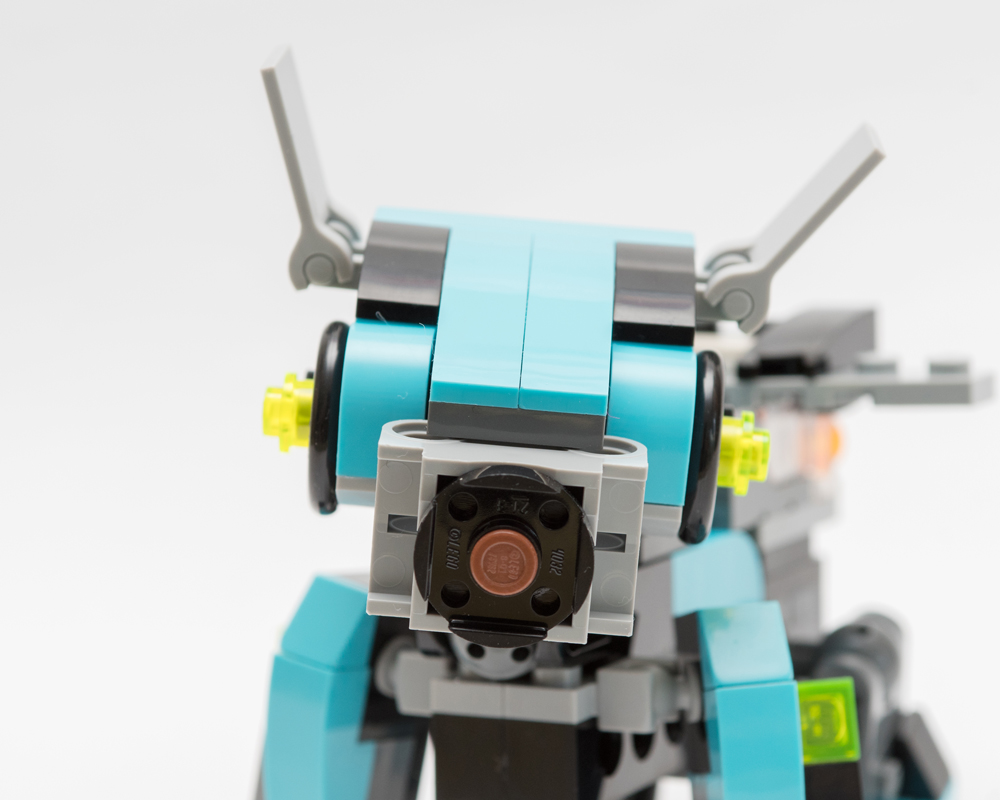
而飞行背包以发光砖为核心,机器鸟的翅膀到这里变成了飞行背包的机翼,发光效果就是表现出飞行背包的喷射效果。不过飞行背包下面光秃秃的,是尾巴被烧掉了吗?




小狗的设计整体还是比较简单,毕竟零件也就100多块,不过可动性还不错。不但头部能随意转动、耳朵能上下飞舞,四肢活动范围也比较大,能够做出跑跳蹲坐的动作,真的很有趣,很想把这个形态保留下来,看来这31062需要多买一套了。自己还随手改了一下,拿掉飞行背包,加跟小尾巴。


探险机器人
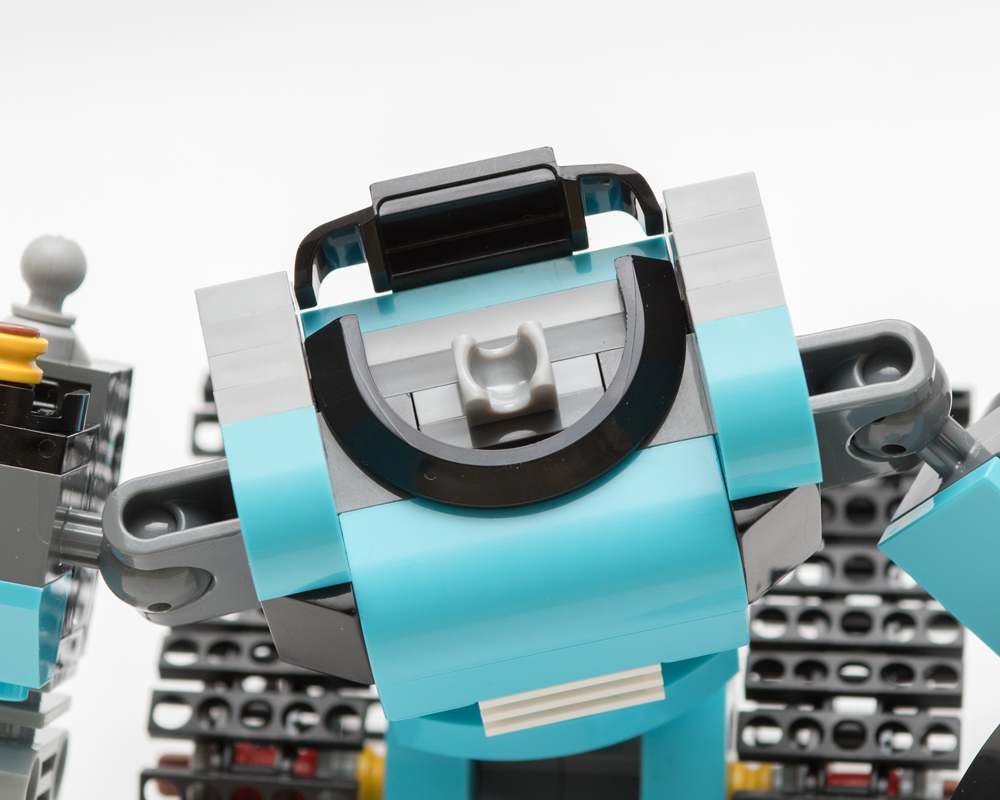
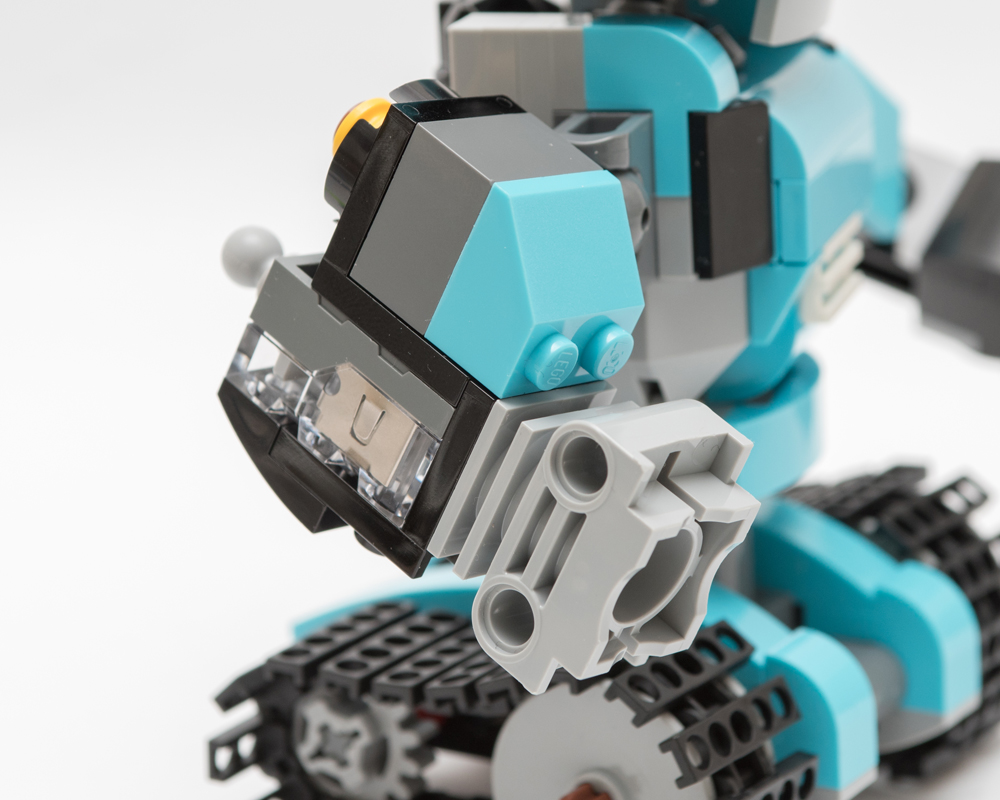
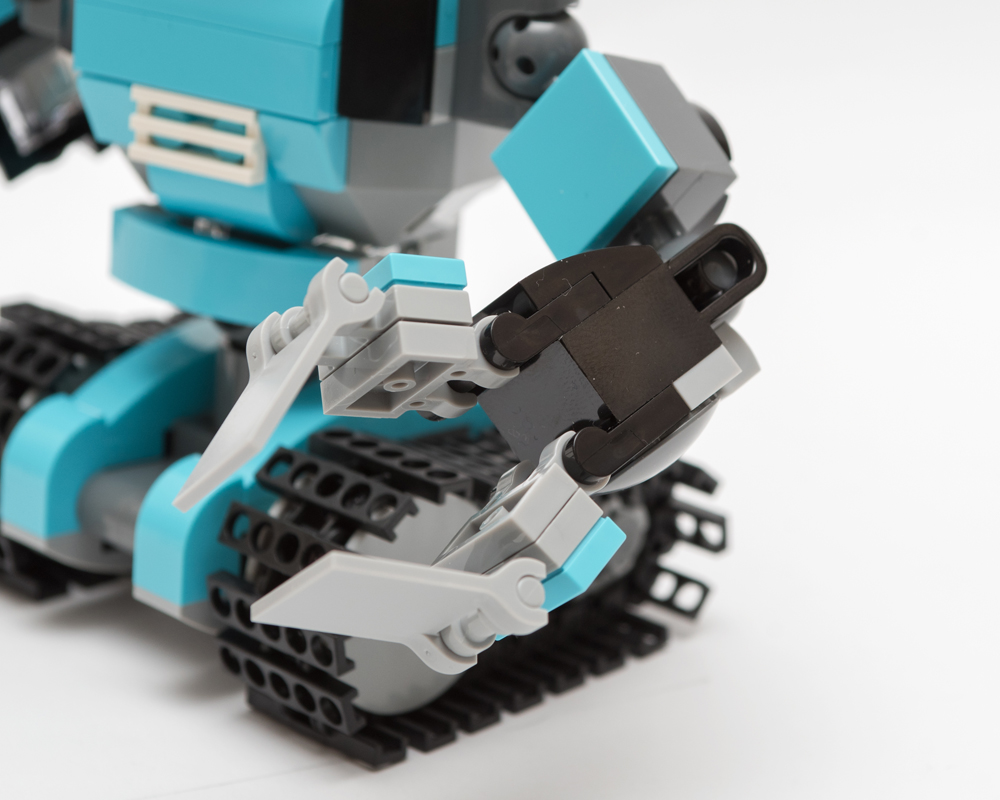
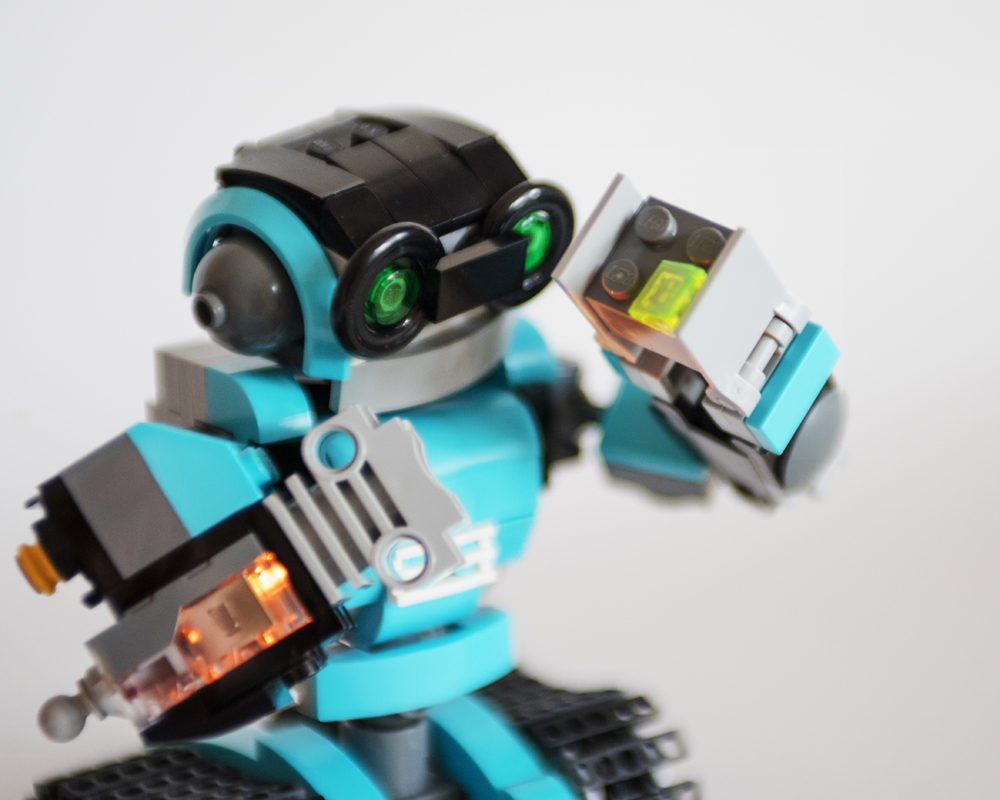
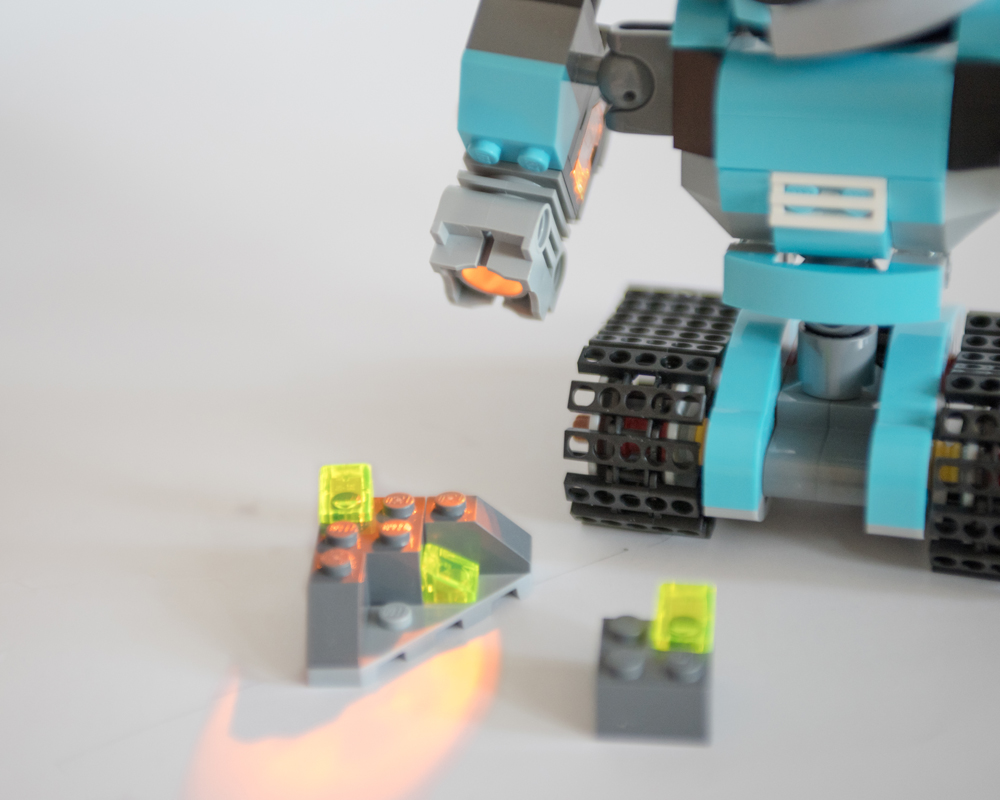
最后来到标准形态:探险机器人。全部200多块砖用上,我们看到的是一个双履带、造型完备的机器人。整体与机器狗、机器鸟一样,呈淡蓝色,有着一对大眼睛、扁扁的鼻子(就是1×2的光面板)、大嘴巴、一对招风耳。两只机械手臂,一只长着机械手,一只则接上了探测仪。另外还搭建了两块矿石,就是探险机器人在寻找的目标吧。





如前所述,探险机器人有着一个非常标准的机器人头部,大而无辜的双眼、扁平而没有存在意义的鼻子、和蔼可亲的大嘴、圆圆的招风耳。头部搭建的时候使用了大量的弧面砖,去颗粒化做的也很好。
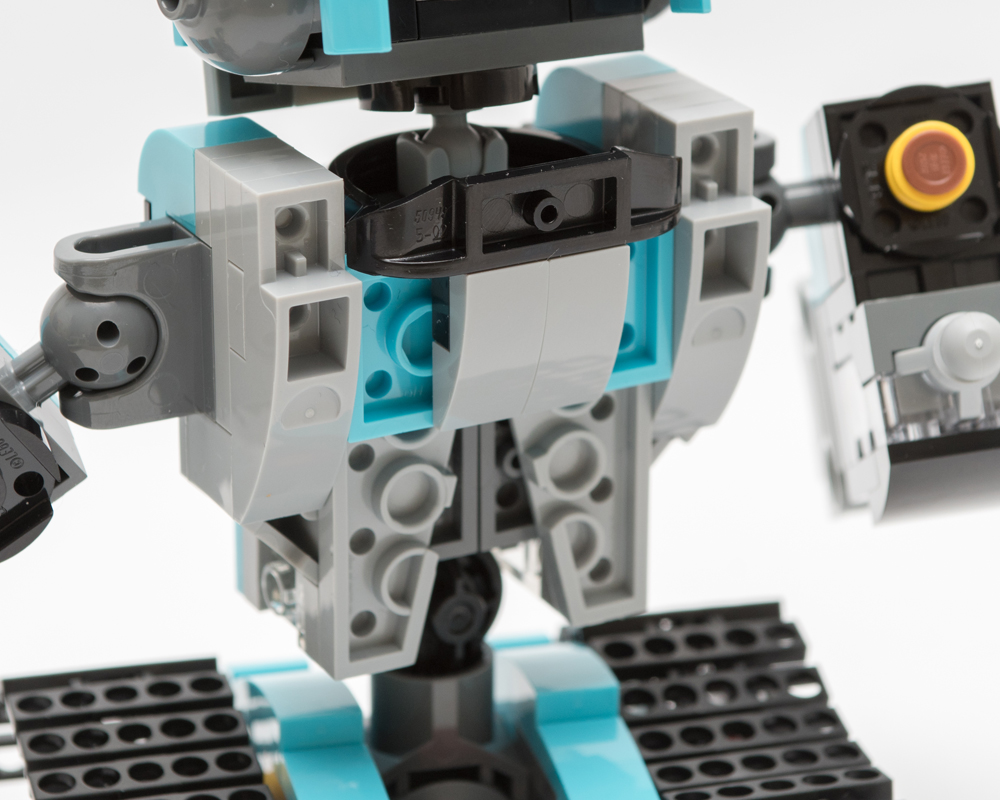
头部和身体靠一个小球形关节连接,承载着这么大的头,还是有点担心。而双臂不但功用不同,而且设计上也完全不同,有机械手的左臂有着肩关节和肘关节,而有着探测器的右臂只有肩关节。
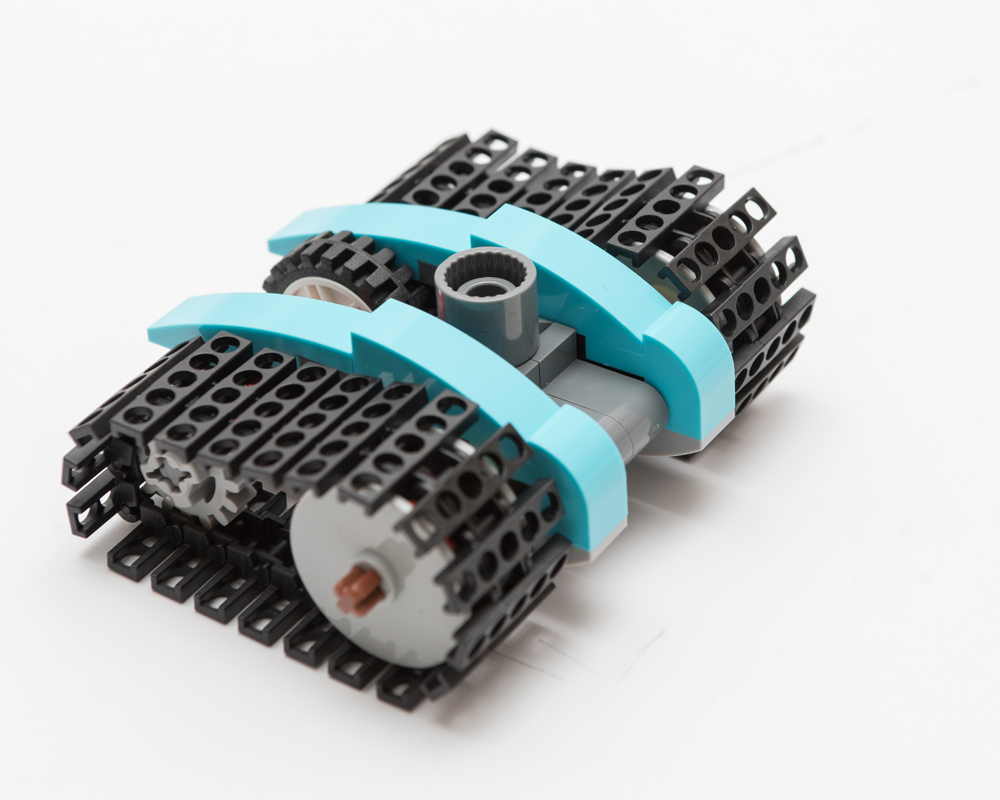
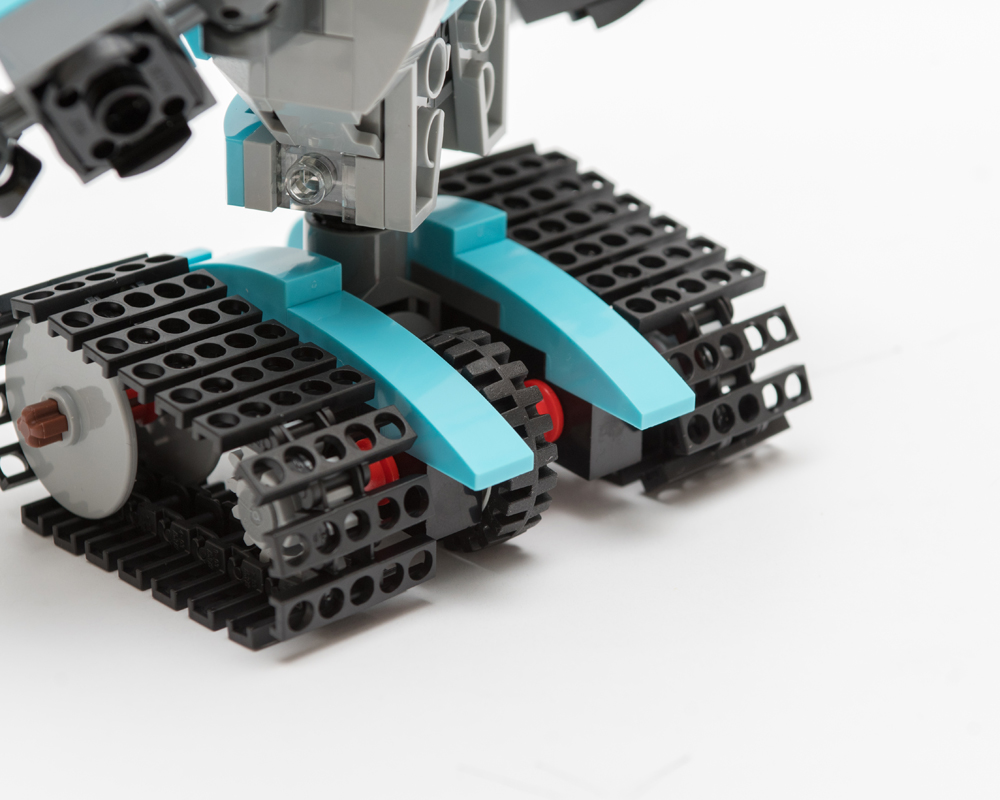
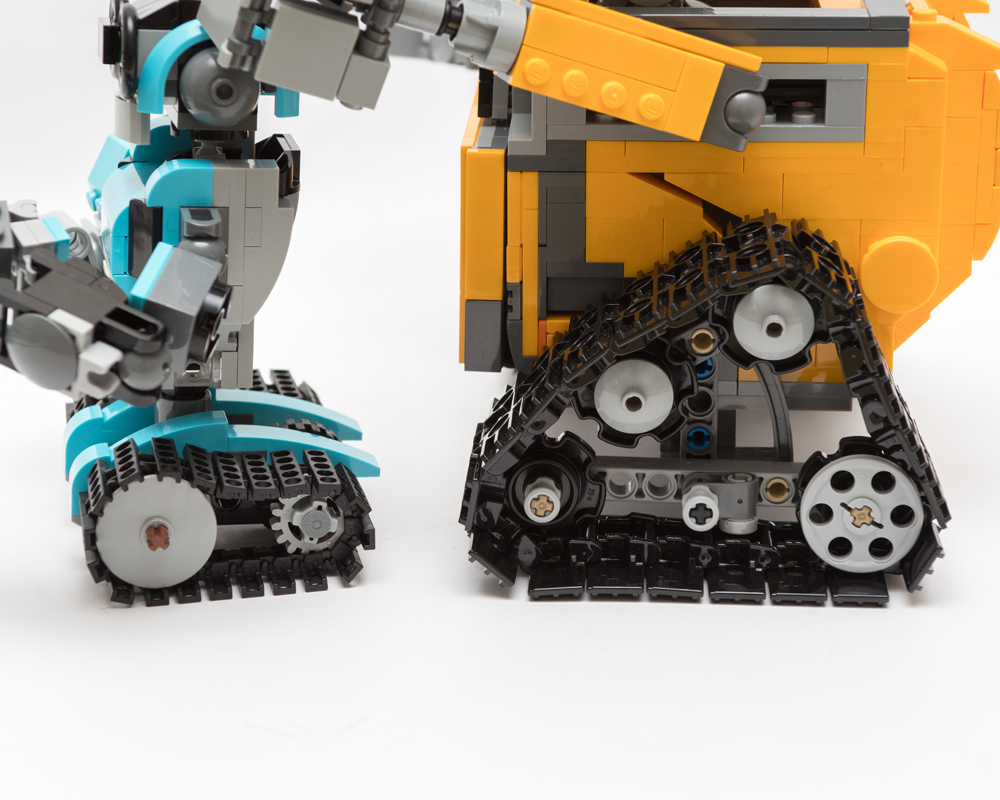
躯干的正面和头部一样做的很完整,但是收零件限制,背部就简陋了一点。躯干和底部也用常见的关节件连接,身体可以360°旋转。底部的履带部分虽然小,但是结构紧凑,牢固而美观。




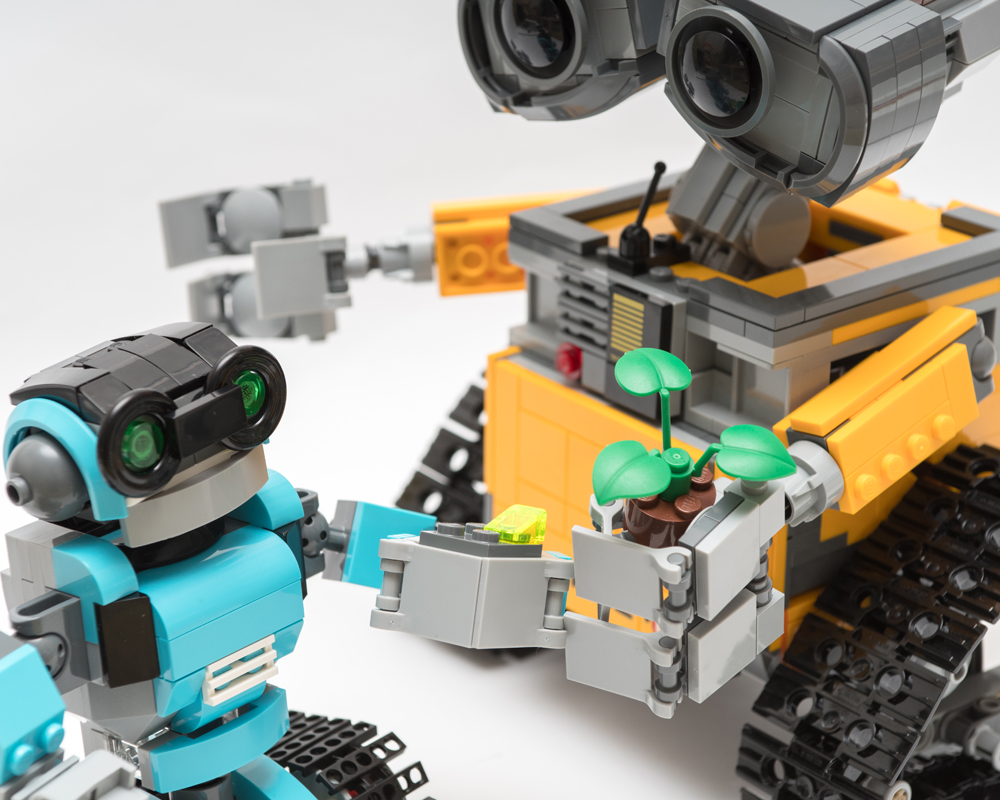
发光砖配合两块矿石造型的零件,可以做出各种研究、发现的动作。而依靠头部、双臂、躯干的各种关节件,机器人可以做出大量的灵活动作,活脱脱一个突破各种艰难险阻的机器探险者。




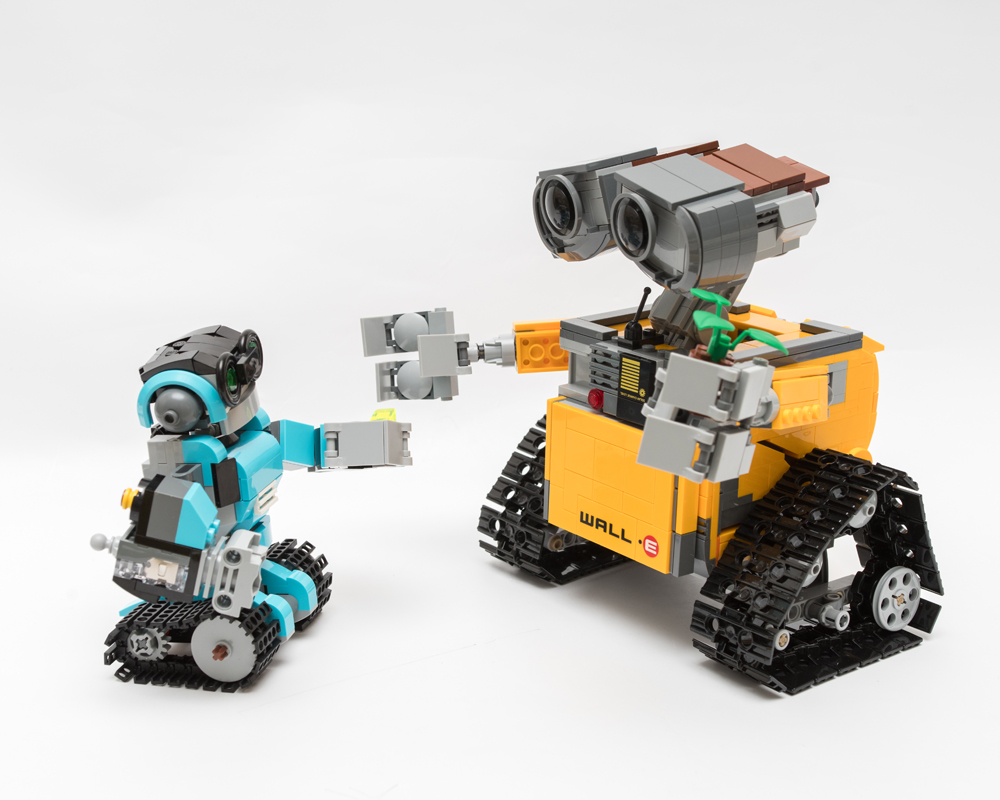
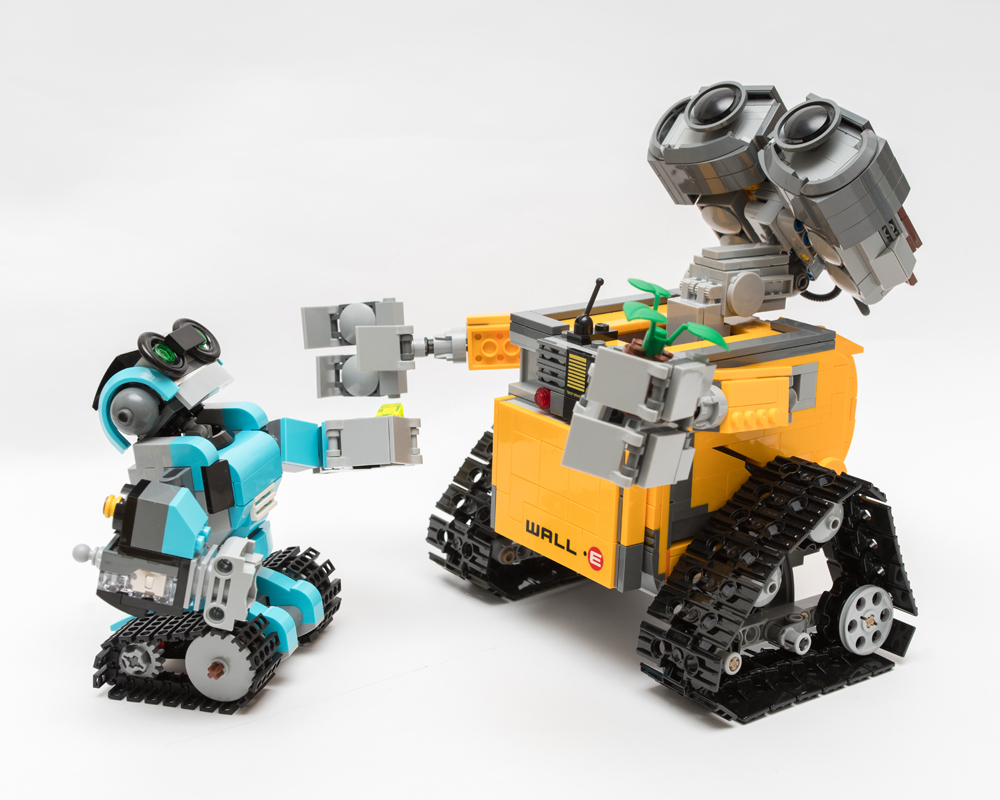
说到一个有着履带底座的机器人,难免不会和另一个机器人——21303瓦力相比较。31062探险机器人的大眼睛、履带座、机械臂,乍看之下会感觉和瓦力有很多相似之处,但是实际放在一起比较,就会发现差异很大。探险机器人虽然比瓦力小了很多,但是多了腰部、肘部关节,不过瓦力是收到原型设计的限制,如果把一些共通的部分放在一起比较,比如躯干、履带部分,就会发现瓦力的细节还是更胜一筹。




最后,作为一个强迫症患者,对于左右不等量的关节耿耿于怀,于是增加了一个球形铰链零件,给探险机器人的探测手臂添加了一个关节,让左右对称一点。不过,好像没有原来可爱了……?


到此结束,谢谢观看!