【丹之岚MOC】遥控迷你瓦力机器人

这个瓦力机器人断断续续做了3个多月,内部结构也调整了几次,目前基本达到了初期的要求。
作品采用了2个接收器,4路通道,2个L马达控制机器人左右差速移动、转向,2个M马达控制手臂和头部运动。

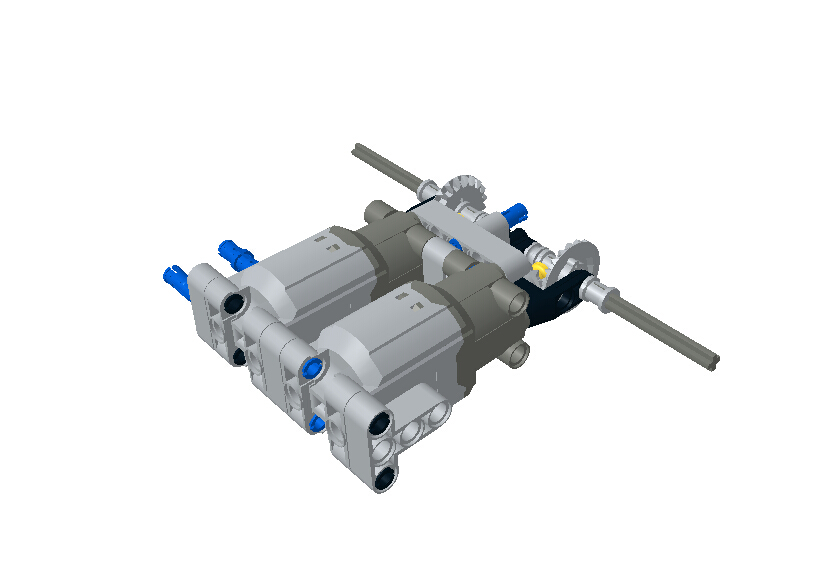
底部的马达驱动结构
由于尺寸的关系,手部的传动使用了橡皮筋。 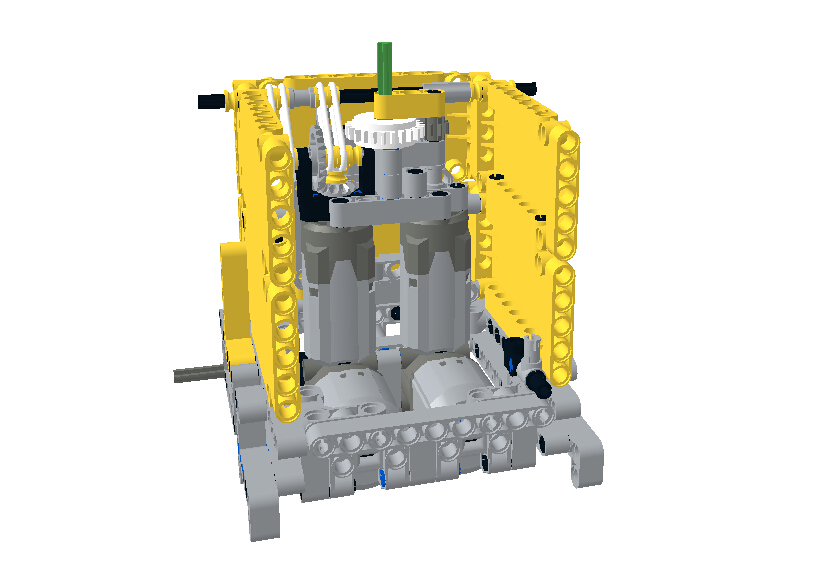
接收器调整到了顶部方便控制。 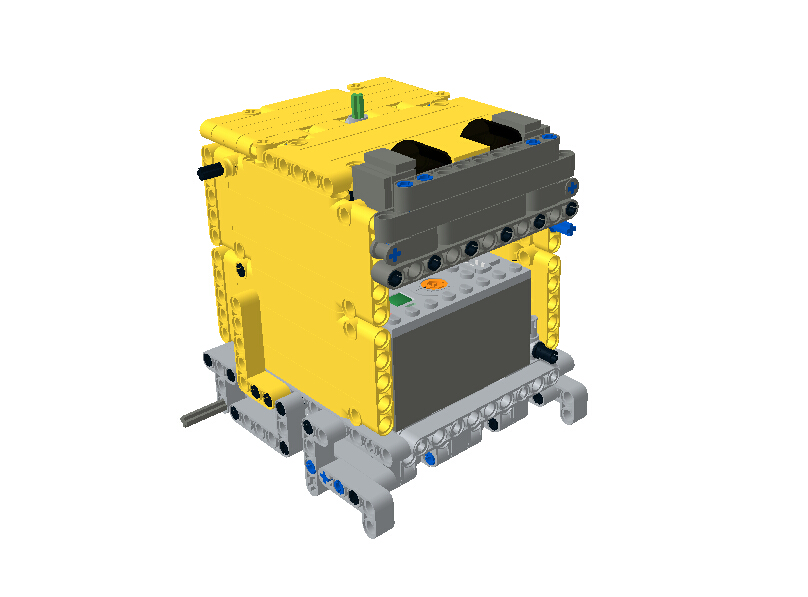
作品演示视频
这个瓦力机器人断断续续做了3个多月,内部结构也调整了几次,目前基本达到了初期的要求。
作品采用了2个接收器,4路通道,2个L马达控制机器人左右差速移动、转向,2个M马达控制手臂和头部运动。
底部的马达驱动结构
由于尺寸的关系,手部的传动使用了橡皮筋。
接收器调整到了顶部方便控制。
作品演示视频